The Hybrid Hexapod® is a game-changing motion control technology that can revolutionize your manufacturing processes. A cutting-edge solution that promises to stimulate innovation and transform your business.






Unlimited/60/60/360
60/6/5/5/360

0.5m/s, 180deg/s

<5nm

Down to +/- 80nm

~<1.0µm
Unlimited/60/60/360
60/6/5/5/360
0.5m/s, 180deg/s
<5nm
Down to +/- 80nm
~<1.0µm
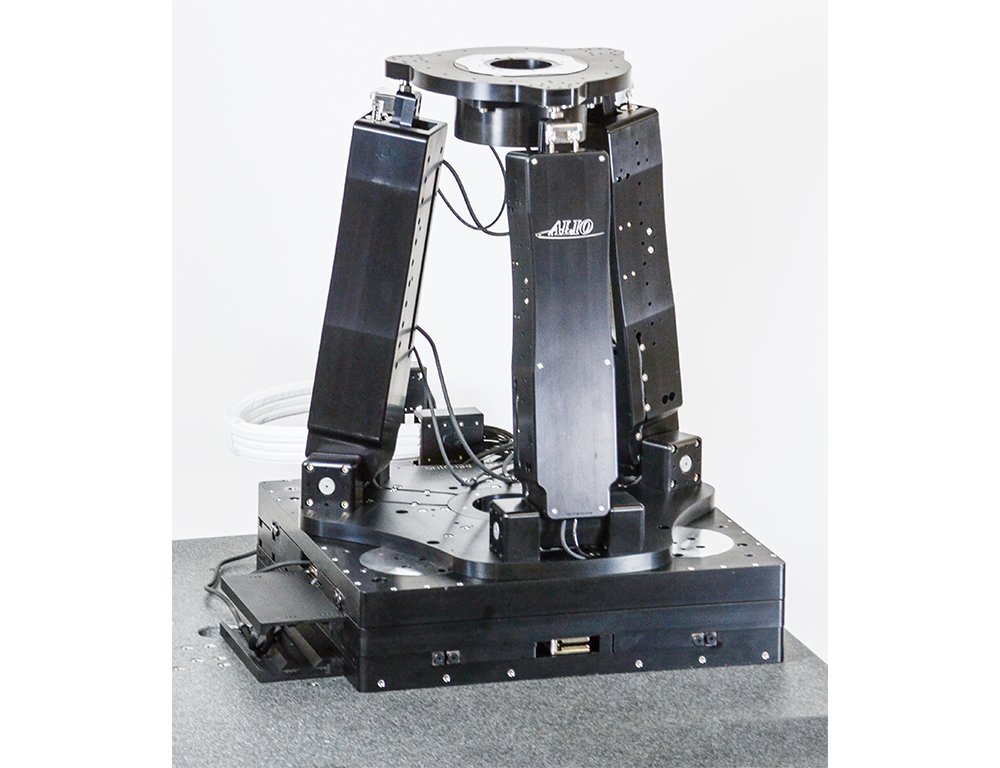
ALIO Industries is a leading provider of innovative and patented positioning devices for mission-critical applications in various industries. Their next-generation hexapod robotic system — the Hybrid Hexapod® — offers superior performance compared to traditional 6 Degree of Freedom (6-DOF) positioning devices, and is available at highly competitive prices. The Hybrid Hexapod® is an all-in-one device that combines a precision XY monolithic stage, tripod, and continuous rotation theta-Z axis, making traditional hexapod kinematics obsolete.
Thanks to its precision, path performance, speed, stiffness, larger work envelope, and virtually unlimited XY travel, the Hybrid Hexapod® has revolutionized 6-DOF positioning. It also offers fully programmable tool-center point locations, making it ideal for applications that require high precision and accuracy.
With less than 100 nm 3-Dimensional 6 axis Point Precision® repeatability, the Hybrid Hexapod® is a must-have technology for mission-critical applications in industries such as laser processing, optical inspection, photonics, semiconductor, metrology, and medical devices. If you’re looking for a reliable Hybrid Hexapod® device, ALIO Industries is the right choice for you.
At ALIO Industries, we believe that traditional hexapods will soon become obsolete. That’s why we’ve developed the Hybrid Hexapod®, a patented and revolutionary approach to six-degree-of-freedom (6-DOF) positioning that delivers nanometer-level accuracy at any working point.
Our innovative modular design features a tripod with non-contact linear driven motors and linear encoders, offering any rotary- and Z-motion capabilities on a monolithic XY basis. Unlike traditional hexapods, the Hybrid Hexapod® boasts a unique stiffness, enabling us to avoid common problems associated with screw-driven Stewart platforms, such as pitch errors, backlash, and friction.
With our design, you can move in X or Y with just one axis, tip or tilt with just three legs of the tripod, and rotate around the Z-axis by adding a 360-degree rotary stage in the middle of the tripod. These features, along with many other specific details, make the Hybrid Hexapod® an ideal solution for any application requiring 6-DOF positioning with nanometer/arc-sec levels of incremental motion and repeatability.
If you’re looking for a unique design that can simplify your six-dimensional motion while drastically increasing your working cubic volume, turn to the Hybrid Hexapod® from ALIO Industries. To learn more about our standard configurations and what they can achieve, check out our comprehensive datasheet.
Standard Hybrid Hexapod: AI-HH-(XY TRAVEL)XY-(Z TRAVEL)Z-(R DIAMETER)R-(OPTION)

Looking for a compact yet high-performing solution for your six degrees of freedom (6-DOF) positioning needs? Look no further than the MINI Hybrid Hexapod® from ALIO Industries.
Despite its small size, the MINI Hybrid Hexapod® offers an impressive 54,000 mm2 working volume (60x60x15mm) and can be scaled to match your required working volume with options such as brakes, gear reduction, ball screw drive, and linear motor drive. This flexibility makes it an ideal solution for automated lens alignment or bonding processes, camera array modules, translational OIS, telescopic integrated lenses, and miniature camera products like cell phone cameras and drones.
When you need nanometer/arc-sec levels of incremental motion and repeatability, the MINI Hybrid Hexapod® delivers the performance you need with the compact size you want. To learn more about our detailed specifications, download our comprehensive datasheet today. Choose ALIO Industries for your 6-DOF positioning needs with one of our range of robotic hexapod solutions.
Find out more by downloading the detailed specifications:
Miniature Hybrid Hexapod: AI-HH-(XY TRAVEL)XY-(Z TRAVEL)Z-(R DIAMETER)RT-(OPTION)

The AngularesTM Hybrid Hexapod® from ALIO Industries offers the widest angular travel range of any 6-Degree-Of-Freedom (6-DOF) positioner on the market, with 60-degree tip/tilt travel. This new hexapod approach features precision crossed roller bearing guides, optical incremental or absolute encoder feedback on all axes, linear motor and/or servo ball screw drives, unlimited programmable tool center point locations, and zero backlash on all axes.
With unlimited XY travel, Z travel of 62 mm (expandable to 208 mm using other tripod models), and continuous 360 degree Theta-Z, the AngularesTM offers unmatched positioning performance. It delivers XYZ bidirectional repeatability of less than +/- 100nm, velocity up to 100 mm/second XY and Z, and less than 10 nanometers linear and 0.1 arc-seconds angular minimum incremental motion.
The AngularesTM is ideal for various applications such as aspheric and freeform optical metrology, silicon photonics packaging and probing, laser micro processing, wafer metrology, camera module alignment and assembly, and optical element and fiber alignment.
Download data sheets to learn more about the AngularesTM Hybrid Hexapod® from ALIO Industries.
AngularesTM – Extra large Tip/Tilt: AI-HH-30D-(XY TRAVEL)XY-(Z TRAVEL)Z-(R DIAMETER)R

ALIO’s modular and versatile Hybrid Hexapod® concept allows various adaptions and customization to align with your application requirements. These can range from applications with several dozens of kg load and high force requirements, to totally novel designs with large apertures. Some requirements have been so commonly requested that we decided to standardize them and make them available to all our customers. See specific details below:
High Torque Hybrid Hexapod: AI-HH-(XY TRAVEL)XY-(Z TRAVEL)Z-(R DIAMETER)RGR
High Load Hybrid Hexapod: AI-6D-(XY TRAVEL)XY-(R DIAMETER)R-(Z TRAVEL)Z-(OPTION)
Ball Screw Driven Hybrid Hexapod: AI-HH-BSD-(XY TRAVEL)XY-(Z TRAVEL)Z-(R DIAMETER)R-(OPTION)
Stepper-Motor based Hybrid Hexapod: AI-HH-ST14-(XY TRAVEL)XY-(Z TRAVEL)Z-(R DIAMETER)R-(OPTION)

Find the right stage for your application using our intuitive product configurator.
Get in touch with ALIO: Expert solutions for your precision motion control needs

翻译由我们中国区合作伙伴Aunion Tech Co., Ltd(上海昊量光电设备有限公司)家提供!
